TRail: Rail-Mounted Container Terminal
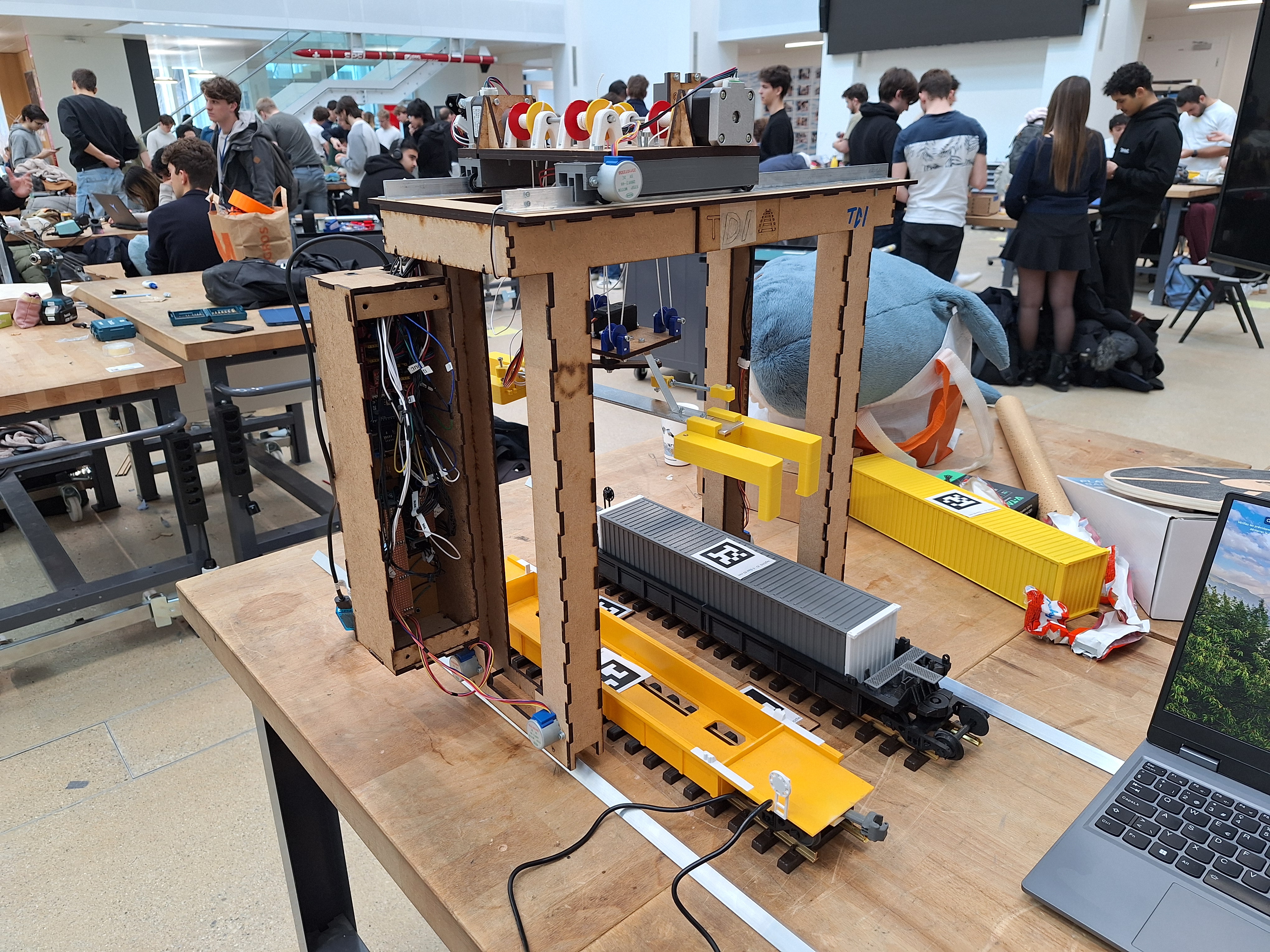
TRail is an automated, rail-mounted container terminal designed to transfer shipping containers between trains. Operating at a miniature scale, it simulates a real-world logistics hub with precise robotic automation.
How It Works
The system integrates several components for autonomous container relocation:
- Rail-Based Mobility: The entire terminal moves along the “train axis” on its own rails to align perfectly with the train cars.
- Robotic Handling: A robotic claw moves between two parallel tracks, descending to locate, grip, and transport individual containers.
- Computer Vision: An onboard camera scans the work area, detecting the position of each container using mounted AprilTags.
- Intelligent Control: A central computer processes the visual data, plans movement paths, and executes the transfer sequence.
- User Interface: Operators send relocation commands through a dedicated application, initiating the terminal to autonomously pick up, transport, and place the specified containers.
Purpose
TRail serves as a functional model of modern intermodal logistics, demonstrating automated transfer in a compact, controlled environment. It shows the integration of robotics, machine vision, and real-time control systems.
Files
| Name | Location |
|---|---|
| Proposal | /docs/assets/MIT_Project_Proposal.pdf |
| Project cad | /hardware/cad/Trail.step |
| Electrical Chart | /docs/assets/Electrical_Chart.pdf |